正確な詳細:
ヒント
1. INAV、DSHOTはDMAの競合のためS3、S5、S7で動作できませんので、ONESHOTまたはMULTISHOTを使用し、ESC PWM範囲をキャリブレーションしてください。
2. BetaFlight、X6およびX8 DSHOTを使用する場合は、dshot_bitbang = ONに設定してください。
3. BetaFlight、ターゲット名がMatekF405TE_SDに変更されました
4. アルドパイロット、LOG_BACKEND_TYPE=1 (ファイル)を設定して、SDカードにログを記録します。
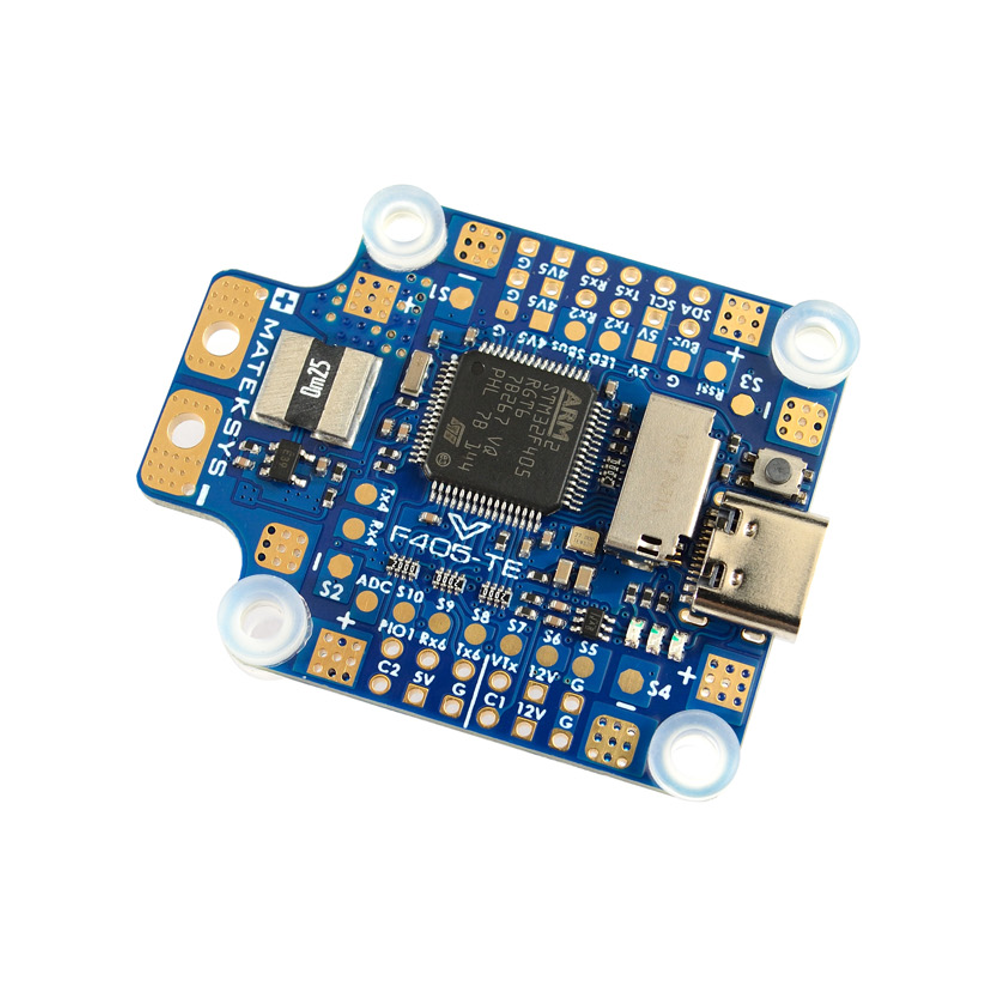
仕様
MCU: 168MHz STM32F405RGT6
IMU: ICM42688-P (SPI)
Baro: SPL06-001 (I2C)
OSD:AT7456E(SPI)
ブラックボックス:MicroSDスロット(SPI)
6x UART、1x Softserial_Tx オプション(INAV/BF)
11x PWM出力(8x BF/アルドパイロット互換のDshot)
1x I2C
4x ADC(VBAT、Current、RSSI、Airspeed)
1x 予備PINIO
4つの個別のESC電源/信号パッド
4in1 ESCシグナル/GND用のG/S1/S2/S3/S4パッド1グループ
SBUS入力用UART2-RXに内蔵のインバータ
切り替え可能なデュアルカメラ入力
PDBの仕様
9~36V (3~8S LiPo)
PDB:4x 35A (最大4x 50A)
BEC: 5V 1.5A
BEC: 12V 2A
LDO 3.3V:200mA
現在のセンサー:220A、3.3V ADC(INAV/BFスケール150、アルドパイロット 66.7 A/V)
バッテリー電圧分圧器 1K:20K (INAVスケール 2100、BFスケール 210、アルドパイロット BATT_VOLT_MULT 21.0)
ファームウェア
アルドパイロット:MatekF405-TE
INAV: MATEKF405TE_SD
BetaFlight: MATEKF405TE_SD
物理的な
取り付け:30.5 x 30.5mm、Φ4mm、ガロン付き Φ3mm
寸法:36 x 46 mm
重量:10g
含める
1x F405-TE
6つのシリコングロメットM4からM3へ
1x ルビコン ZLH 35V/470uF (低 ESR)
レイアウト&配線

INAV/BF マッピング
アルドパイロット マッピング
Frskyスマートポートテレメトリ
非反転(ハッキングされた)S.Port信号
任意のスペアUart_TX
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4、または 10 (yaapu のため)
DJI FPV OSD (アルドパイロット 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIAL4_PROTOCOL = 33
MSP_OPTIONS = 0(ポーリングモード)
リレー(PINIO)
PINIO1、PIO1パッド、デフォルトで低レベル
PINIO2、カメラ切替、デフォルトでC1 ON
# GPIOs
PA4 PINIO1 OUTPUT GPIO(81) LOW //PIO1パッド
PB5 PINIO2 出力 GPIO(82) 低 //カメラスイッチ
# RCx_OPTION:RC入力オプション
28 リレー オン/オフ
34 リレー2オン/オフ
35 リレー3 オン/オフ
36 リレー4 オン/オフ
例えば
RELAY_PIN 81 //PIO1 GPIO
RC7オプション 28 //リレー オン/オフ、トランスミッターのCH7を使用してPIO1のローコントロール/ハイレベルを制御する
RELAY_PIN2 82 //カメラスイッチGPIO
RC8_OPTION 34 //Relay2のオン/オフ、送信機のCH8を使用してPB5パッドの高/低レベルを制御する
設定された機能は、補助スイッチのPWM値が1800よりも高くなったときにトリガーされます。値が1200よりも低くなると無効になります。
スイッチが高くなるときと低くなるときに、ミッションプランナーのInitial Setup >> Mandatory Hardware >> Radio Calibration画面で送信機から送られるPWM値をチェックしてください。1800よりも高くならないまたは1200よりも低くならない場合は、送信機のサーボエンドポイントを調整することが最善です。
ヒント
- F405-TEはQCのためにINAVファームウェアがプリロードされています
- BLHeliSuiteでBLHeli32 ESCのPWMレートを48KHz以上に設定してください
アルドパイロット
アルドパイロットのファームウェアで「内部エラー 0x4000 l:213 spi_fail」の警告が表示されましたので、ログのためにLOG_BACKEND_TYPE = 1(ファイル)に設定してください。
アルドパイロットファームウェアをダウンロードする ここ.
INAV
INAVファームウェアでは、DMAの衝突によりDSHOTはS3、S5、S7で動作できません。ONESHOTまたはMULTISHOTを使用し、ESC PWM範囲をキャリブレーションしてください。
MatckウェブサイトからINAVファームウェア4.1.xをダウンロードしてください。INAV configuratorからはINAV5.x以降を直接ダウンロードしてください。
BetaFlight
5Vパッシブブザーを使用する場合、CLIに「set beeper_frequency = 2500」と入力してください。
MATEKF405TE_SDターゲットはBF4.4以降でサポートされています。
X6およびX8 DSHOTを使用する場合は、dshot_bitbangをONに設定します
BF構成ツールから直接BF 4.3をダウンロードできます, BF 4.2.xはからダウンロードできます ここ.
Barometer SPL06-001はBetaflightによってサポートされていません。