正確な詳細:
機能:
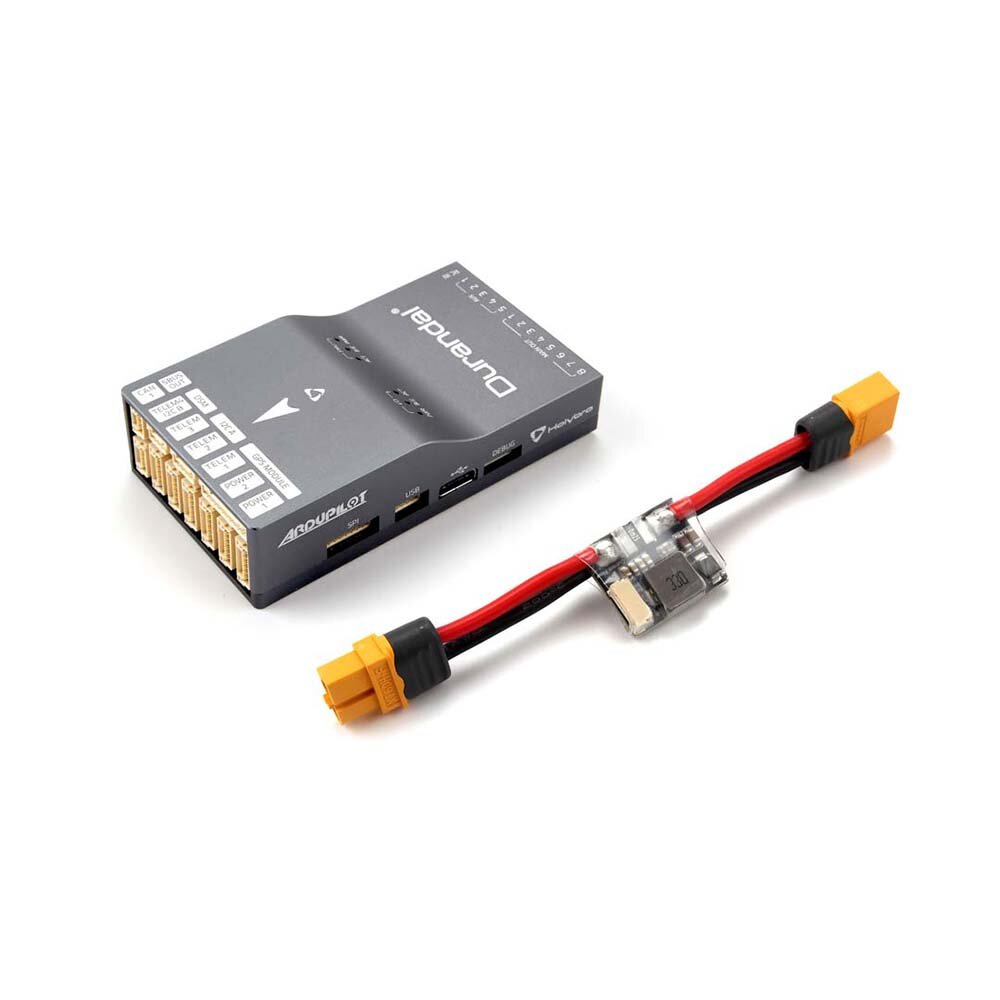
DurandalはHolybroによって設計された新しいフライトコントローラーで、STM32H7マイクロコントローラーシリーズを利用しています。ドローンの企業や開発者がより強力なモデルを実行し、埋め込みメモリの能力を向上させる必要があるため、Durandalは開発ニーズのためのパフォーマンスアップグレードを提供するように設計されています。集中的な計算機能が必要な場合には、この利点が役立ちます。
過去の数年間にわたる私たちの豊富なオートパイロットの構築経験を生かし、ハードウェアの機械設計に新しい振動吸収システムを導入し、センサーの温度制御には統合済みIMUヒーターを搭載しています。 DurandalはPX4で予めインストールされており、Ardupilotなどの他のフライトスタックでもサポートされています。
2.PM02は、LiPoバッテリーからのクリーンパワーと電流消費およびバッテリーボルテージの測定を、6ポジションケーブルを介してAPMとPix32に提供する簡単な方法です。オンボードのスイッチングレギュレーターは、12S LiPoバッテリーまでから5.2Vと最大3Aを出力します。Power ModuleはXT60コネクターで完全に組み立てられており、保護のために収縮チューブで包装されています。
パワーモジュールは、APM、Pix32、RCレシーバー、およびAPMアクセサリー(GPS、ラジオ)に電力を供給するために設計されています。サーボを駆動するためのものではありません。それには航空機独自のESC/BECを使用してください。GH端子はまた、Pix32、Pixhawk4、Pixhawk4 Mini、およびDurandalとも互換性があります。
Durandal フライトコントローラの仕様:
メインFMUプロセッサー:STM32H743
32ビット Arm® Cortex®-M7、480MHz、2MBメモリ、1MB RAM
IOプロセッサ:STM32F100
32 Bit Arm ® Cortex®-M3、24MHz、8KB SRAM
オンボードセンサー
Accel/Gyro: ICM-20689
Accel / Gyro: BMI088
Mag: IST8310
バロメーター:MS5611
GPS: ublox Neo-M8N GPS/GLONASS 受信機; 統合磁気センサー IST8310
シリアルポートのマッピング:
SERIAL0 -> USB
SERIAL1 -> UART2 (Telem1)
SERIAL2 -> UART3 (Telem2)
SERIAL3 -> UART1 (GPS)
SERIAL4 -> UART4(Telem4 I2CB)
SERIAL5 -> UART6 (Telem3)
SERIAL6 -> UART7(予備、デバッグ)
電気データ
電圧評価:
電源モジュールの出力:4.9〜5.5V
最大入力電圧:6V
最大電流検知: 120A
USB電源入力:4.75〜5.25V
サーボレール入力:0〜36V
機械データ:
寸法:80*45*20.5mm
重量:68.8g
PM02 V3パワーモジュール仕様:
UBEC入力電圧:7〜51V(2〜12s LiPo)
定格電流:60A
最大電流: 120A (<60S)
最大電流検知: 120A
12Sバッテリーをサポートします
3.3V ADCに設定された電圧および電流の測定
スイッチングレギュレーターは5.2Vと最大3Aを出力します
重量: 20g
PM02にバッテリーの電荷量を表示させる
ミッションプランナーセットアップ:
1. バッテリーにPM02を接続し、USB経由でミッションプランナーにも接続します。
2.「INITIAL SETUP」をクリックし、「バッテリーモニター」メニューに移動します。
3. “モニト”を“アナログ電圧と電流”に変換してください。
4. 「センサー」を「9:Holybro Pixhawk4 PM」にしてください。
5. 「HW Ver: 」を「The Cube or Pixhawk」にする(pixhawk4、pixhawk4mini、pix32v5、pix32)」※
これは空白のままにしてください(Durandal)
7. 入力「18.182」を電圧分圧器(計算済み)に入力します。
「アンペア毎ボルト」に「36.364」を入力します。
9.設定を完了するために、それを切断して再接続します。( "計測されたバッテリ電圧" は、バッテリの現在の電荷量を示します。)
パッケージに含まれるもの:
1x Durandal フライトコントローラ
1x PM02 V3 電源モジュール